V tomoto článku se naučíme řídit krokový motor pomocí Raspberry Pi Pico. Využijeme k tomu PIO koprocesor a DMA, takže naše řízení bude neblokující (procesor se jím nebude zabývat).
Organizace kódu
Tento ovladač motoru využívá stavové automaty PIO a kanály DMA na RP2040 k odlehčení řízení krokového motoru (přes čip ULN2003) od CPU. Timto způsobem můžeme řídit až dva motory, na víc nám nestačí DMA kanály a PIO stavové stroje. Řízení dvou motorů nezávisle bude ukázáno dále. Teď se zaměříme na jeden motor. Uživatel nastaví v céčkovém kódu směr, rychlost a počet kroků, které se mají provést a poté spustí ovladač pro motor. Motor provede zadaný počet kroků zadanou rychlostí a ve zadaném směru a poté vyvolá přerušení zpět do CPU, kterým signalizuje, že je hotov. To vše je neblokující, takže CPU může pokračovat v činnosti i během pohybu motoru. Ovladač podporuje dynamickou úpravu rychlosti a směru během manévru motoru.

Stavový automat pro počítání kroků motoru SM2
Stavový automat pro počítání kroků (SM2 ve výše uvedeném vývojovém diagramu) je zodpovědný za řízení počtu kroků provedených motorem a za přerušení zpět do CPU, když motor dokončí svůj manévr.
Nejprve načte zadaný počet kroků z FIFO do OSR a poté tuto hodnotu z OSR přesune do pomocného registru X.
V smyčce countloop stavový automat SM2 signalizuje stavovému automatu délky impulsu SM1 spuštění nového impulsu, čeká na signál, že daný impuls byl spuštěn, a poté snižuje hodnotu X.
Bude pokračovat v signalizaci stavovému automatu délky impulsu, dokud X není nula, načež odešle přerušení do CPU, že všechny zadané kroky byly provedeny.
Stavový automat čeká, až CPU toto přerušení vymaže, a poté načte nový zadaný počet kroků.
pull block ; načteme požadovaný počet kroků z FIFO do OSR
mov x, osr ; zkopírujeme hodnotu v OSR do pomocného registru X
countloop:
irq wait 2 ; signalizujeme, že začalo počítání kroků, čekáme až je přerušení vynulováno
jmp x-- countloop ; opakujeme dokud X nedosáhne 0
irq wait 0 ; přerušení do procesoru (obslouží rutina ISR1), čekáme až je vynulovánoStavový automat pro čítání kroků je řízen kanálem DMA (DMA 4 na PIO0). Tento kanál DMA je spouštěn softwarově, aby uživatel mohl spustit motor v určitém okamžiku aplikace. Všimněte si, že tyto kanál DMA odesílá 32bitovou hodnotu do stavových automatů čítačů. V principu to znamená, že motoru by mohlo být přikázáno provést \(2^{32}\) kroků, které by při maximální rychlosti motoru trvaly přibližně 2 dny. U aplikací, které vyžadovaly nepřetržitou rotaci, by rutina obsluhy přerušení spuštěná po provedení všech přikázaných kroků přikázala novou sadu kroků.
Stavový automat s délkou impulsu SM1
Rychlost motoru je řízena manipulací s délkou impulsu (každý impuls způsobí krok).
Tento stavový automat PIO omezuje rychlost, s jakou stavový automat generující impulsy vyšle nový impuls do motoru, čímž způsobí, že motor provede krok.
Tento stavový automat využívá funkci autopull PIO na RP2040 k vyhnutí se pull instrukci.
Když je OSR prázdný, stavový automat automaticky načte novou hodnotu z FIFO.
Poté tuto hodnotu přesune do pomocného registru X a provede zpoždění ve jmp smyčce o tento počet cyklů.
Pokud obdrží signál ze stavového automatu pro počítání kroků, že by měl být proveden krok, odešle přerušení do stavového automatu generujícího pulzy, aby na piny vyslal nový pulz.
V případě, že byly dokončeny všechny kroky, se tento stavový automat na wait 1 irq 2 instrukci zastaví.
out x, 32 ; přesuneme hodnotu z OSR do pomocného registru X (máme nastavený autopull)
countloop:
jmp x-- countloop ; točíme se ve smyčce dokud X nedosáhne 0
wait 1 irq 2 ; čekáme na signál s počítacího SM2
irq 3 ; signalizujem SM0 poslat pulsyTento stavový automat je řízen kanálem DMA2, který je řízen parametrem PIO_TX_DREQ.
Když je FIFO prázdné, automaticky se zahájí nový přenos DMA.
Kanál DMA2, který komunikuje se stavovým automatem PIO, je propojen s druhým kanálem DMA3, který rekonfiguruje a restartuje první.
Tímto způsobem tento kanál DMA2 vždy poskytuje data stavovému automatu PIO, když je potřebuje.
Uživatel může změnit hodnotu na paměťové adrese, odkud si kanál DMA2 bere data, aby dynamicky měnil hodnotu odesílanou do tohoto stavového automatu. Tímto způsobem lze během manévru měnit rychlost motorů.
Stavový automat generující pulzy
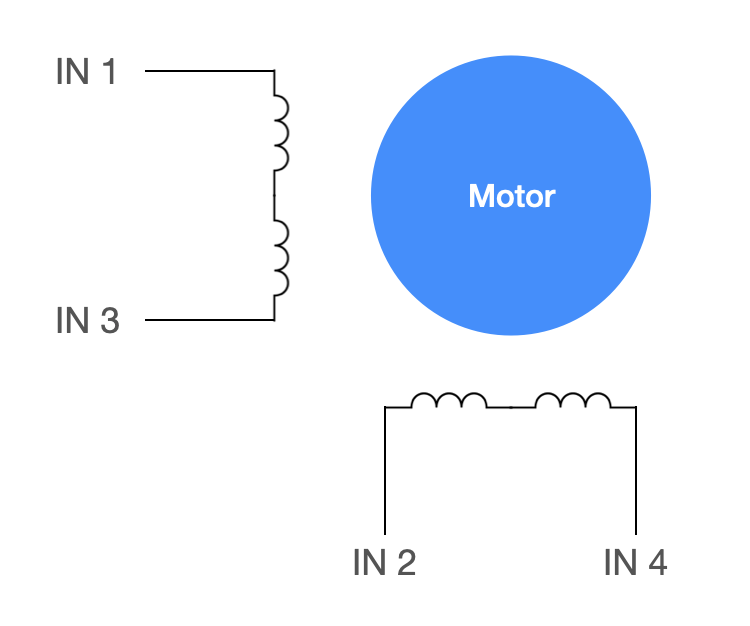
ULN2003 je řadič krokového motoru (soustava 7 invertorů a Darlingtonových tranzistorů) a krokový motor se 4 vstupy má zapojení uvedené níže.
Motor může být plně krokový nebo poloviční, ale s polovičním krokem má vyšší rychlost a točivý moment. Posloupnost přepínání polovičního kroku je uvedena v tabulce níže.
| IN1 | IN2 | IN3 | IN4 | hexadecimálně | |
|---|---|---|---|---|---|
1. půlkrok |
vysoký |
nízký |
nízký |
vysoký |
0x09 |
2. půlkrok |
vysoký |
nizký |
nízký |
nízký |
0x08 |
3. půlkrok |
vysoký |
vysoký |
nízký |
nízký |
0x0c |
4. půlkrok |
nízký |
vysoký |
nízký |
nízký |
0x04 |
5. půlkrok |
nízký |
vysoký |
vysoký |
nízký |
0x06 |
6. půlkrok |
nízký |
nízký |
vysoký |
nízký |
0x02 |
7. půlkrok |
nízký |
nízký |
vysoký |
vysoký |
0x03 |
8. půlkrok |
nízký |
nízký |
nízký |
vysoký |
0x01 |
Stavový automat PIO, který odesílá tuto pulzní sekvenci na piny GPIO připojené k ovladači motoru, je poměrně jednoduchý. Čeká na signál ze stavového automatu délky pulzu a poté pomocí outinstrukce přesune data z OSR na 4 výstupní piny (připojené k IN1, IN2, IN3 a IN4 regulátoru motoru). Tento stavový automat PIO má také povolený automatický přenos dat (autopull) a pokaždé, když posune 4 bity z OSR, načte nový stav o půl kroku.
wait 1 irq 3 ; čekáme na signál, abychom předali pulsy na piny
out pins, 4 ; nastavujeme piny (máme nastavené autopull)Stejně jako ostatní stavové automaty je i tento řízen kanálem DMA. Kanál DMA dodává pulzní sekvenci, která bude umístěna na piny. Dělá to po 8 bitech, a to krokováním jedné z pulzních sekvencí zobrazených níže. První je posloupnost, která způsobí pohyb proti směru hodinových ručiček, druhá je obrácená posloupnost, která způsobí pohyb ve směru hodinových ručiček, a poslední posloupnost nezpůsobí žádný pohyb motoru. Změnou ukazatele, který kanál DMA0 používá pro sběr dat, může uživatel dynamicky změnit směr otáčení nebo zastavit motor.
unsigned char pulse_sequence_forward[8] = { 0x9, 0x8, 0xc, 0x4, 0x6, 0x2, 0x3, 0x1 };
unsigned char pulse_sequence_backward[8] = { 0x1, 0x3, 0x2, 0x6, 0x4, 0xc, 0x8, 0x9 };
unsigned char pulse_sequence_stationary[8] = { 0x0, 0x0, 0x0, 0x0, 0x0, 0x0, 0x0, 0x0 };API
Pro každý motor existuje nastavovací funkce. Tyto funkce nastavují a spouštějí kanály DMA a rutiny pro obsluhu přerušení spojené s ovladačem motoru. Jako argument každá nastavovací funkce bere číslo pinu GPIO, ke kterému je připojen IN1 pro ovladač krokového motoru.
Předpokládá se, že IN2 je připojen k číslu GPIO IN1+1, IN3 k pinu GPIO IN1+2 a IN4 k pinu GPIO IN1+3. Druhým argumentem každé nastavovací funkce je název obslužné rutiny přerušení pro přerušení, které bude vyvoláno stavovým automatem počítání kroků po dokončení manévru.
#define MOVE_STEPS_MOTOR_1(a) pulse_count_motor1=a; dma_channel_start(dma_chan_4)
#define SET_SPEED_MOTOR_1(a) pulse_length_motor1=a
#define SET_DIRECTION_MOTOR_1(a) address_pointer_motor1 = (a==2) ? &pulse_sequence_forward[0] : (a==1) ? &pulse_sequence_backward[0] : &pulse_sequence_stationary[0]Pomocí tohoto API může uživatel zadat směr otáčení motoru, rychlost a počet kroků, které je třeba provést. Řadič provede manévr neblokujícím způsobem a po dokončení manévru vyvolá přerušení. Alternativně toto API podporuje dynamickou úpravu rychlosti a směru motoru, což uživateli umožňuje uvést motor do režimu volného chodu a dynamicky aktualizovat jeho rychlost a směr.
Jednoduchý příklad
V tomto příkladě se motor otočí o čtvrt otáčky po směru hodinek, počká a otočí se zpět o čtvrt otáčky proti směru hodinek. Řízení motoru probíhá v obsluze přerušení. Unipolární krokový motorek 28BYJ-48 funguje na 5V, má převodovku 1:64 (do pomala), jeden krok motorku je 5.625˚/64 = 0.08789˚. Odběr proudu při otáčení je přibližně 70 mA, v klidu asi 22 mA.
step1/stepper.c
/**
*
* vha3@cornell.edu
* September, 2021
*
* This demonstrates position and velocity control
* of two ULN2003 steppers. If each of those steppers
* is attached to the knob of an etch-a-sketch with a timing
* belt, this demo draws the Lorenz curve on the etch-a-sketch.
*
* https://vanhunteradams.com/Pico/Steppers/Lorenz.html
*
*
*/
#include "motor_library.h"
#include <math.h>
#define MOTOR1_IN1 2
#define convert(a) (unsigned int)(125000000./(Fs*(float)a))
#define Fs 50.0
// Variables to hold motor speed
volatile unsigned int motorspeed = 250000;
// Variables to track motor direction
volatile int direction = 1 ;
volatile int old_direction = 1 ;
// Speed values
volatile float speed ;
// Motor directions
unsigned int motor1_direction ;
// Position control interrupts
void pio0_interrupt_handler() {
pio_interrupt_clear(pio_0, 0);
switch( direction ) {
case CLOCKWISE: direction = STOPPED; old_direction = CLOCKWISE; break;
case STOPPED: direction = (old_direction==CLOCKWISE) ? COUNTERCLOCKWISE : CLOCKWISE; break;
case COUNTERCLOCKWISE: direction = STOPPED; old_direction = COUNTERCLOCKWISE; break;
}
SET_DIRECTION_MOTOR_1(direction);
if( direction == STOPPED ) {
MOVE_STEPS_MOTOR_1(2000);
}
else {
MOVE_STEPS_MOTOR_1(4000);
}
}
int main() {
stdio_init_all();
// Nastaveni motoru
setupMotor1(MOTOR1_IN1, pio0_interrupt_handler);
SET_DIRECTION_MOTOR_1(STOPPED);
old_direction = COUNTERCLOCKWISE;
SET_SPEED_MOTOR_1(250000);
MOVE_STEPS_MOTOR_1(400);
while (true) {
}
}step1/motor_library.h
/**
* V. Hunter Adams
* vha3@cornell.edu
* September, 2021
*/
#include <stdio.h>
#include "pico/stdlib.h"
#include "hardware/pio.h"
#include "hardware/dma.h"
#include "hardware/irq.h"
#include "stepper.pio.h"
#include "pacer.pio.h"
#include "counter.pio.h"
// Makra pro směr otáčení
#define COUNTERCLOCKWISE 2
#define CLOCKWISE 1
#define STOPPED 0
// Posloupnosti pulsů dopředu, dozadu a stání
unsigned char pulse_sequence_forward[8] = {0x9, 0x8, 0xc, 0x4, 0x6, 0x2, 0x3, 0x1} ;
unsigned char pulse_sequence_backward[8] = {0x1, 0x3, 0x2, 0x6, 0x4, 0xc, 0x8, 0x9} ;
unsigned char pulse_sequence_stationary[8] = {0x0, 0x0, 0x0, 0x0, 0x0, 0x0, 0x0, 0x0} ;
// Unsigned ints to hold pulse length and no. of pulses
unsigned long int pulse_length_motor1 = (1u << 17) - 1 ;
unsigned long int pulse_count_motor1 = 1024 ;
// Pointers to the addresses of the above objects (motor 1)
unsigned char * address_pointer_motor1 = &pulse_sequence_forward[0] ;
unsigned long int * pulse_length_motor1_address_pointer = &pulse_length_motor1 ;
unsigned long int * pulse_count_motor1_address_pointer = &pulse_count_motor1 ;
// Makra pro nastavení motoru: počet kroků, rychlost a směr
#define MOVE_STEPS_MOTOR_1(a) pulse_count_motor1=a; dma_channel_start(dma_chan_4)
#define SET_SPEED_MOTOR_1(a) pulse_length_motor1=a
#define SET_DIRECTION_MOTOR_1(a) address_pointer_motor1 = (a==2) ? &pulse_sequence_forward[0] : (a==1) ? &pulse_sequence_backward[0] : &pulse_sequence_stationary[0]
// Výběr PIO koprocesoru
PIO pio_0 = pio0;
// Nastavení stavových strojů na PIO koprocesoru
int pulse_sm = 0;
int pacer_sm = 1;
int count_sm = 2;
// DMA kanály
// 0 posílá posloupnost pulsů do motoru, 1 konfiguruje a restartuje 0
// 2 sends pulse length data to motor 1, 3 reconfigures and restarts 2
// 4 sends step count to motor 1 (channel started in software)
int dma_chan_0 = 0;
int dma_chan_1 = 1;
int dma_chan_2 = 2;
int dma_chan_3 = 3;
int dma_chan_4 = 4;
void setupMotor1(unsigned int in1, irq_handler_t handler) {
// Načteme PIO program do PIO0
uint pio0_offset_0 = pio_add_program(pio_0, &stepper_program);
uint pio0_offset_1 = pio_add_program(pio_0, &pacer_program);
uint pio0_offset_2 = pio_add_program(pio_0, &counter_program);
// Inicializujeme PIO programy
stepper_program_init(pio_0, pulse_sm, pio0_offset_0, in1);
pacer_program_init(pio_0, pacer_sm, pio0_offset_1);
counter_program_init(pio_0, count_sm, pio0_offset_2) ;
// Spustíme PIO programy
pio_sm_set_enabled(pio_0, pulse_sm, true);
pio_sm_set_enabled(pio_0, pacer_sm, true);
pio_sm_set_enabled(pio_0, count_sm, true);
// Nastavení přerušení
pio_interrupt_clear(pio_0, 0) ;
pio_set_irq0_source_enabled(pio_0, PIO_INTR_SM0_LSB, true) ;
irq_set_exclusive_handler(PIO0_IRQ_0, handler) ;
irq_set_enabled(PIO0_IRQ_0, true) ;
////////////////////////////////////////////////////////////////////////////////////
// ===========================-== DMA datové kanály ================================
////////////////////////////////////////////////////////////////////////////////////
// Channel Zero (sends pulse train data to PIO stepper machine)
dma_channel_config c0 = dma_channel_get_default_config(dma_chan_0); // default configs
channel_config_set_transfer_data_size(&c0, DMA_SIZE_8); // 32-bit txfers
channel_config_set_read_increment(&c0, true); // no read incrementing
channel_config_set_write_increment(&c0, false); // no write incrementing
channel_config_set_dreq(&c0, DREQ_PIO0_TX0) ; // DREQ_PIO0_TX0 pacing (FIFO)
channel_config_set_chain_to(&c0, dma_chan_1); // chain to other channel
dma_channel_configure(
dma_chan_0, // Channel to be configured
&c0, // The configuration we just created
&pio_0->txf[pulse_sm], // write address (stepper PIO TX FIFO)
address_pointer_motor1,
8, // Number of transfers; in this case each is 4 byte.
false // Don't start immediately.
);
// Channel One (reconfigures the first channel)
dma_channel_config c1 = dma_channel_get_default_config(dma_chan_1); // default configs
channel_config_set_transfer_data_size(&c1, DMA_SIZE_32); // 32-bit txfers
channel_config_set_read_increment(&c1, false); // no read incrementing
channel_config_set_write_increment(&c1, false); // no write incrementing
channel_config_set_chain_to(&c1, dma_chan_0); // chain to other channel
dma_channel_configure(
dma_chan_1, // Channel to be configured
&c1, // The configuration we just created
&dma_hw->ch[dma_chan_0].read_addr, // Write address (channel 0 read address)
&address_pointer_motor1, // Read address (POINTER TO AN ADDRESS)
1, // Number of transfers, in this case each is 4 byte
false // Don't start immediately.
);
// ------
// Channel 2 (sends pulse length data to PIO pacer machine)
dma_channel_config c2 = dma_channel_get_default_config(dma_chan_2); // default configs
channel_config_set_transfer_data_size(&c2, DMA_SIZE_32); // 32-bit txfers
channel_config_set_read_increment(&c2, false); // no read incrementing
channel_config_set_write_increment(&c2, false); // no write incrementing
channel_config_set_dreq(&c2, DREQ_PIO0_TX1) ; // DREQ_PIO0_TX1 pacing (FIFO)
channel_config_set_chain_to(&c2, dma_chan_3); // chain to other channel
dma_channel_configure(
dma_chan_2, // Channel to be configured
&c2, // The configuration we just created
&pio_0->txf[pacer_sm], // write address (pacer PIO TX FIFO)
pulse_length_motor1_address_pointer,
1, // Number of transfers; in this case each is 4 byte.
false // Don't start immediately.
);
// Channel 3 (reconfigures the second channel)
dma_channel_config c3 = dma_channel_get_default_config(dma_chan_3); // default configs
channel_config_set_transfer_data_size(&c3, DMA_SIZE_32); // 32-bit txfers
channel_config_set_read_increment(&c3, false); // no read incrementing
channel_config_set_write_increment(&c3, false); // no write incrementing
channel_config_set_chain_to(&c3, dma_chan_2); // chain to other channel
dma_channel_configure(
dma_chan_3, // Channel to be configured
&c3, // The configuration we just created
&dma_hw->ch[dma_chan_2].read_addr, // Write address (channel 2 read address)
&pulse_length_motor1_address_pointer, // Read address (POINTER TO AN ADDRESS)
1, // Number of transfers, in this case each is 4 byte
false // Don't start immediately.
);
// -------
// Channel 4 (sends pulse count to PIO counter machine)
dma_channel_config c4 = dma_channel_get_default_config(dma_chan_4); // default configs
channel_config_set_transfer_data_size(&c4, DMA_SIZE_32); // 32-bit txfers
channel_config_set_read_increment(&c4, false); // no read incrementing
channel_config_set_write_increment(&c4, false); // no write incrementing
dma_channel_configure(
dma_chan_4, // Channel to be configured
&c4, // The configuration we just created
&pio_0->txf[count_sm], // write address (pacer PIO TX FIFO)
pulse_count_motor1_address_pointer,
1, // Number of transfers; in this case each is 4 byte.
false // Don't start immediately.
);
// Start the two data channels
dma_start_channel_mask((1u << dma_chan_0) | (1u << dma_chan_2)) ;
}step1/stepper.pio
.program stepper
wait 1 irq 3 ; Wait for signal to put pulse on pins
out pins, 4 ; Put a pulse on the pins, AUTOPULL ENGAGED
% c-sdk {
static inline void stepper_program_init(PIO pio, uint sm, uint offset, uint pin) {
pio_sm_config c = stepper_program_get_default_config(offset);
sm_config_set_out_pins(&c, pin, 4);
// Setup autopull, 32-bit threshold, right-shift OSR
sm_config_set_out_shift(&c, 1, 1, 4) ;
pio_gpio_init(pio, pin);
pio_gpio_init(pio, pin+1);
pio_gpio_init(pio, pin+2);
pio_gpio_init(pio, pin+3);
pio_sm_set_consecutive_pindirs(pio, sm, pin, 4, true);
pio_sm_init(pio, sm, offset, &c);
}
%}step1/pacer.pio
.program pacer
out x, 32 ; Shift value from OSR to scratch X (AUTOPULL ENGAGED)
countloop:
jmp x-- countloop ; Loop until X hits 0
wait 1 irq 2 ; Wait for signal to pulse from counter state machine
irq 3 ; Signal to send a pulse
% c-sdk {
static inline void pacer_program_init(PIO pio, uint sm, uint offset) {
pio_sm_config c = pacer_program_get_default_config(offset);
sm_config_set_out_shift(&c, 1, 1, 32) ;
pio_sm_init(pio, sm, offset, &c);
}
%}step1/counter.pio
.program counter
pull block ; Copy commanded # of steps from FIFO to OSR
mov x, osr ; Copy value from OSR to scratch X
countloop:
irq wait 2 ; Signal for a step to occur, wait for flag to clear
jmp x-- countloop ; Loop until X hits 0
irq wait 0 ; IRQ to CPU ISR, wait for CPU to clear
% c-sdk {
static inline void counter_program_init(PIO pio, uint sm, uint offset) {
pio_sm_config c = counter_program_get_default_config(offset);
pio_sm_init(pio, sm, offset, &c);
}
%}step1/CMakeLists.txt
# cmake version
cmake_minimum_required(VERSION 3.13)
# include the sdk.cmake file
include($ENV{PICO_SDK_PATH}/external/pico_sdk_import.cmake)
# give the project a name (anything you want)
project(Stepper_Motors_position_and_speed C CXX ASM)
# initialize the sdk
pico_sdk_init()
add_executable(Stepper_Motors_position_and_speed)
pico_generate_pio_header(Stepper_Motors_position_and_speed ${CMAKE_CURRENT_LIST_DIR}/stepper.pio)
pico_generate_pio_header(Stepper_Motors_position_and_speed ${CMAKE_CURRENT_LIST_DIR}/pacer.pio)
pico_generate_pio_header(Stepper_Motors_position_and_speed ${CMAKE_CURRENT_LIST_DIR}/counter.pio)
target_sources(Stepper_Motors_position_and_speed PRIVATE stepper.c)
target_link_libraries(Stepper_Motors_position_and_speed PRIVATE pico_stdlib pico_bootsel_via_double_reset hardware_pio hardware_dma hardware_irq)
pico_add_extra_outputs(Stepper_Motors_position_and_speed)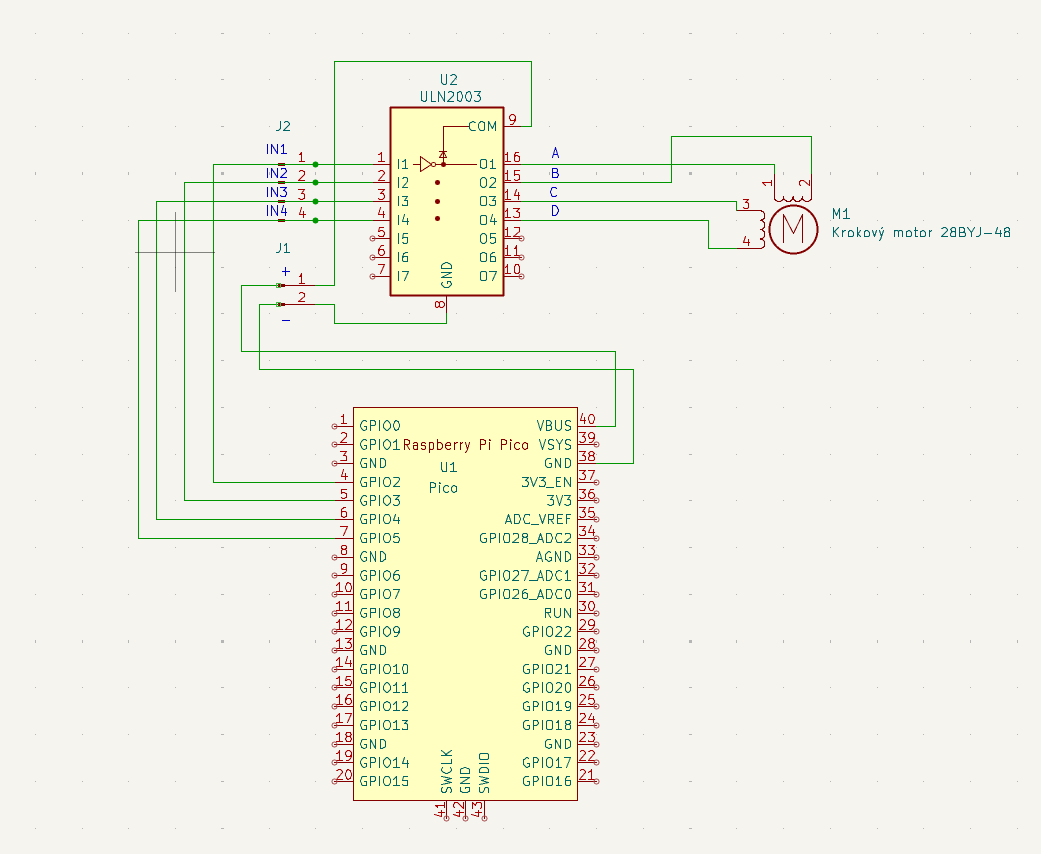
Rozšíření pro dva motory
Pokud budeme potřebovat dva motory, stačí zapojit druhý PIO koprocesor a další DMA kanály. Posloupnosti pulsů zůstanou stejné.
