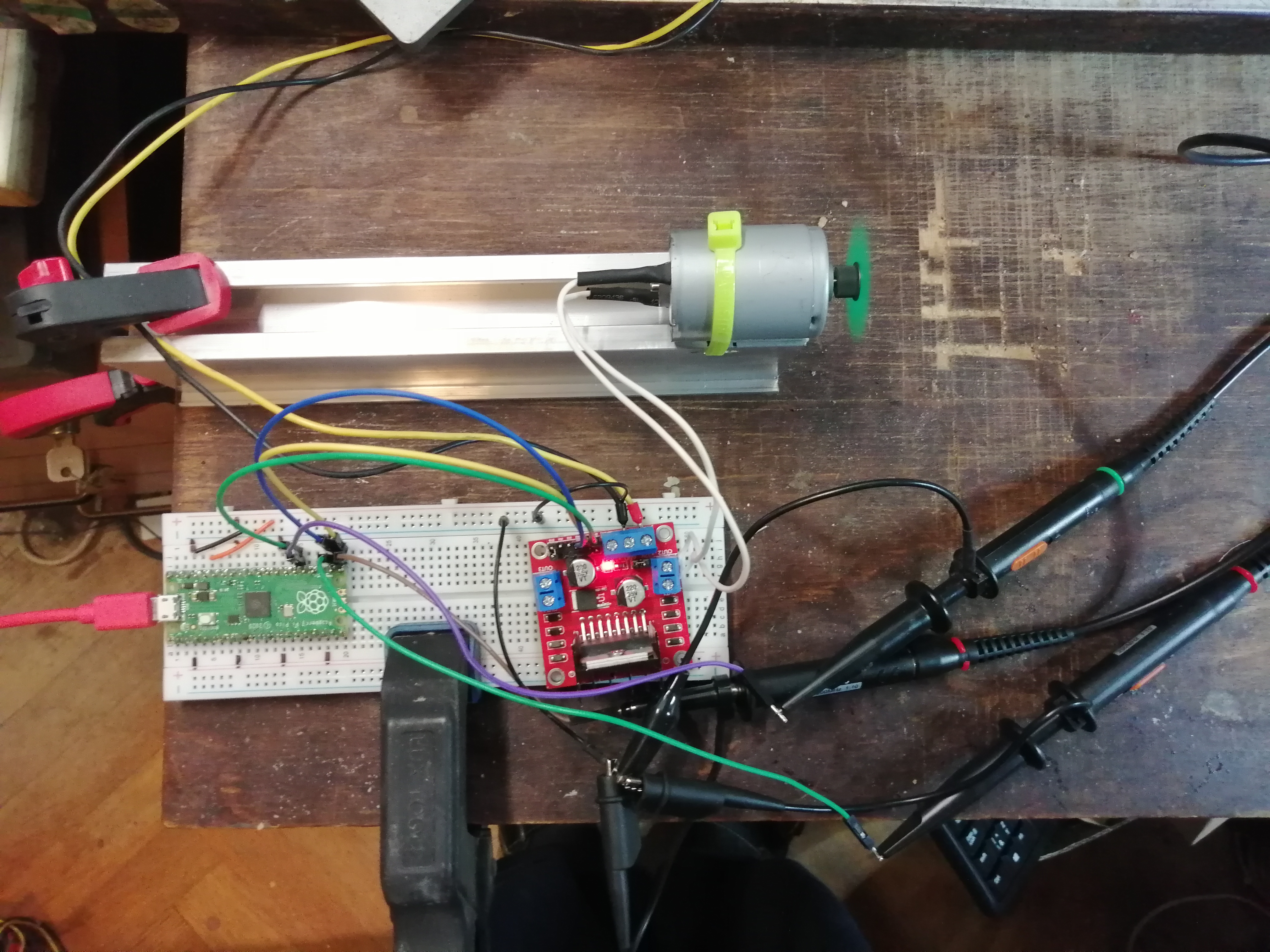
Pomocí H-můstku s obvodem L298N a Pica můžeme řídit rychlost a směr otáčení stejnosměrného kartáčového motoru. Motor můžeme řídit dvěma způsoby.
-
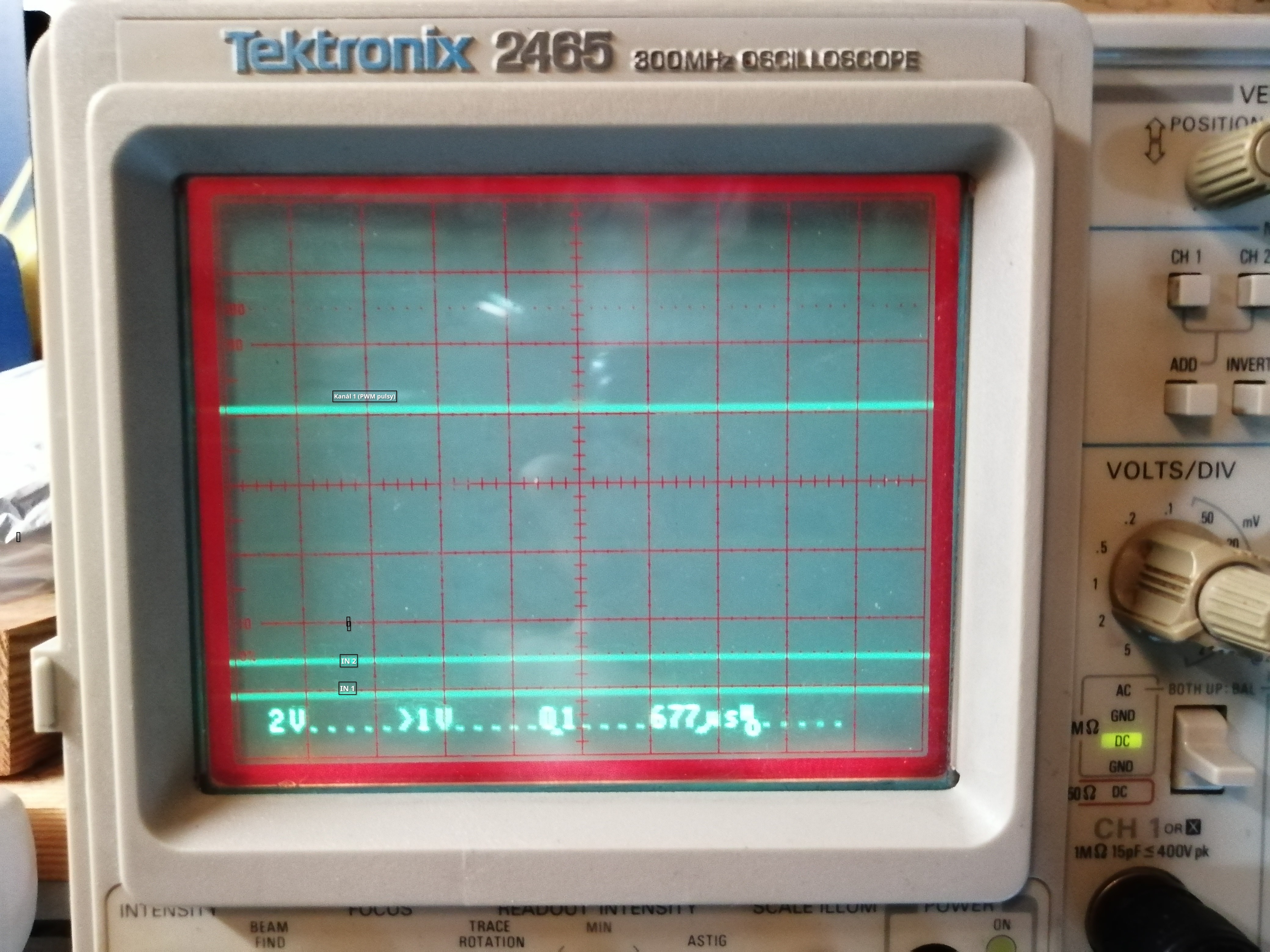
PWM pulsy přivádíme na vstupy IN1 a IN2, přičemž A Enable je na vysoké úrovni (propojen jumper A enable). To je ukázáno v C programu.
-
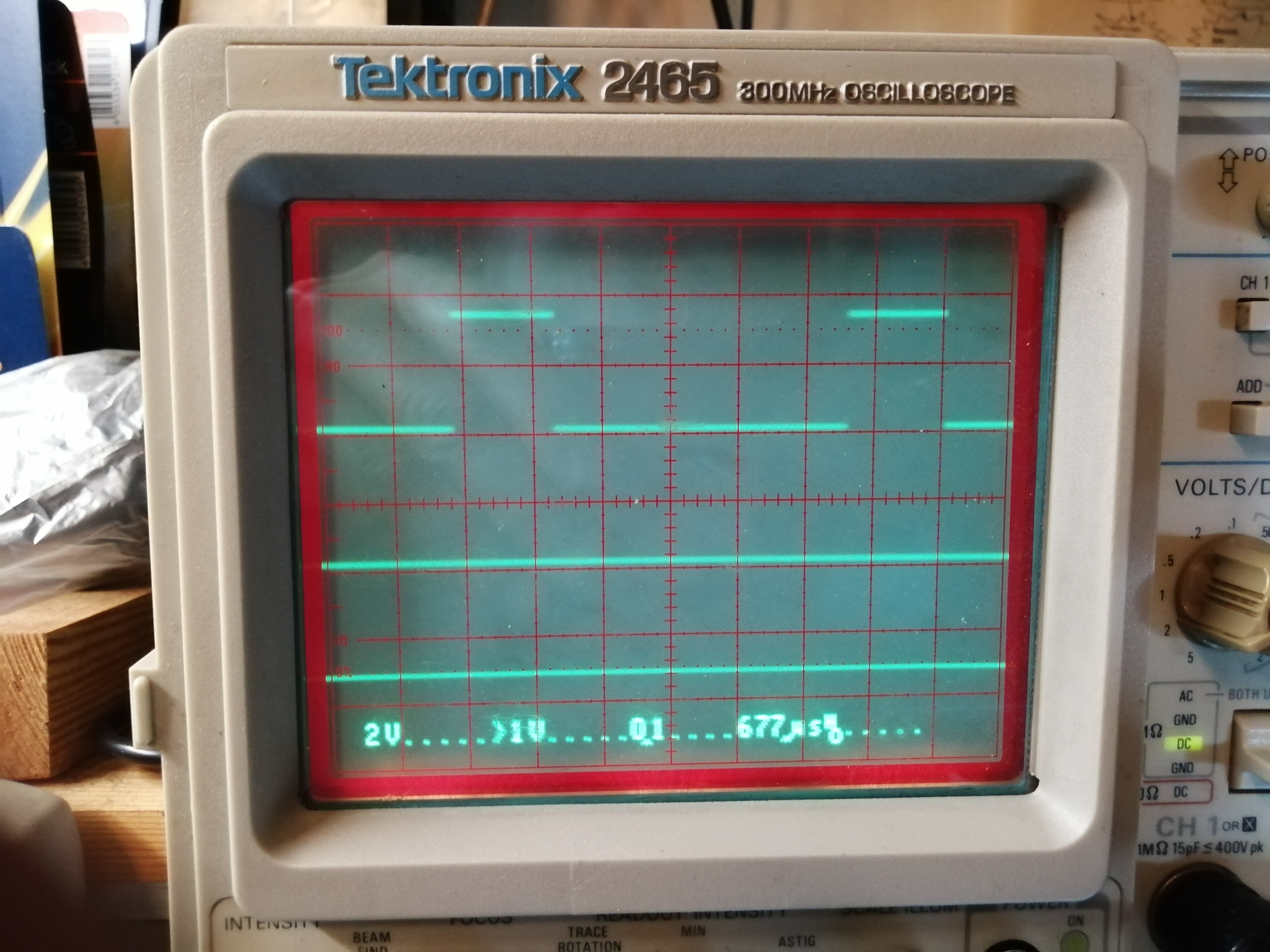
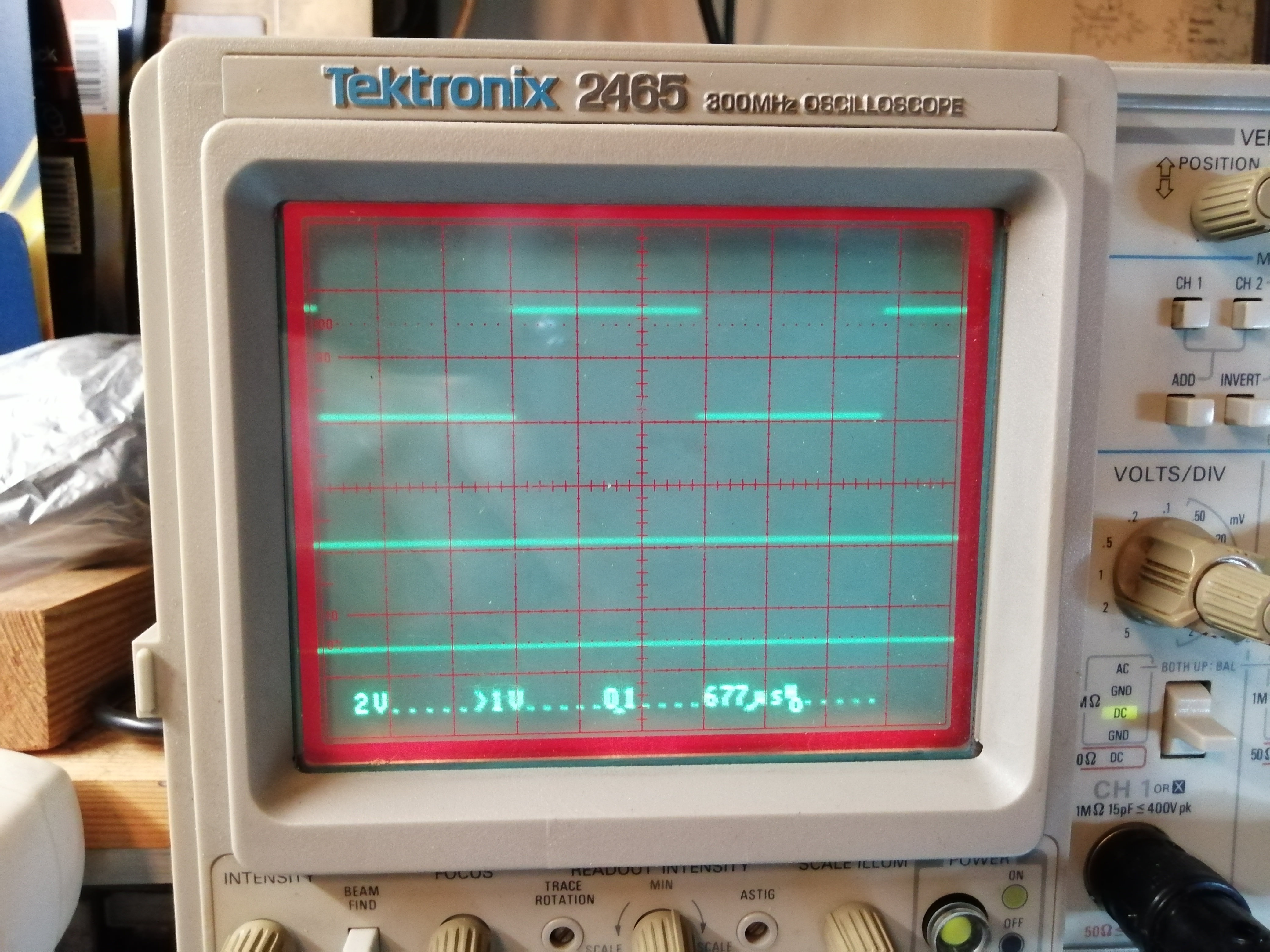
PWM pulsy přivádíme na vstup A Enable a pomocí IN1 a IN2 určujeme směr otáčení motoru. To je ukázáno v MicroPythonu.
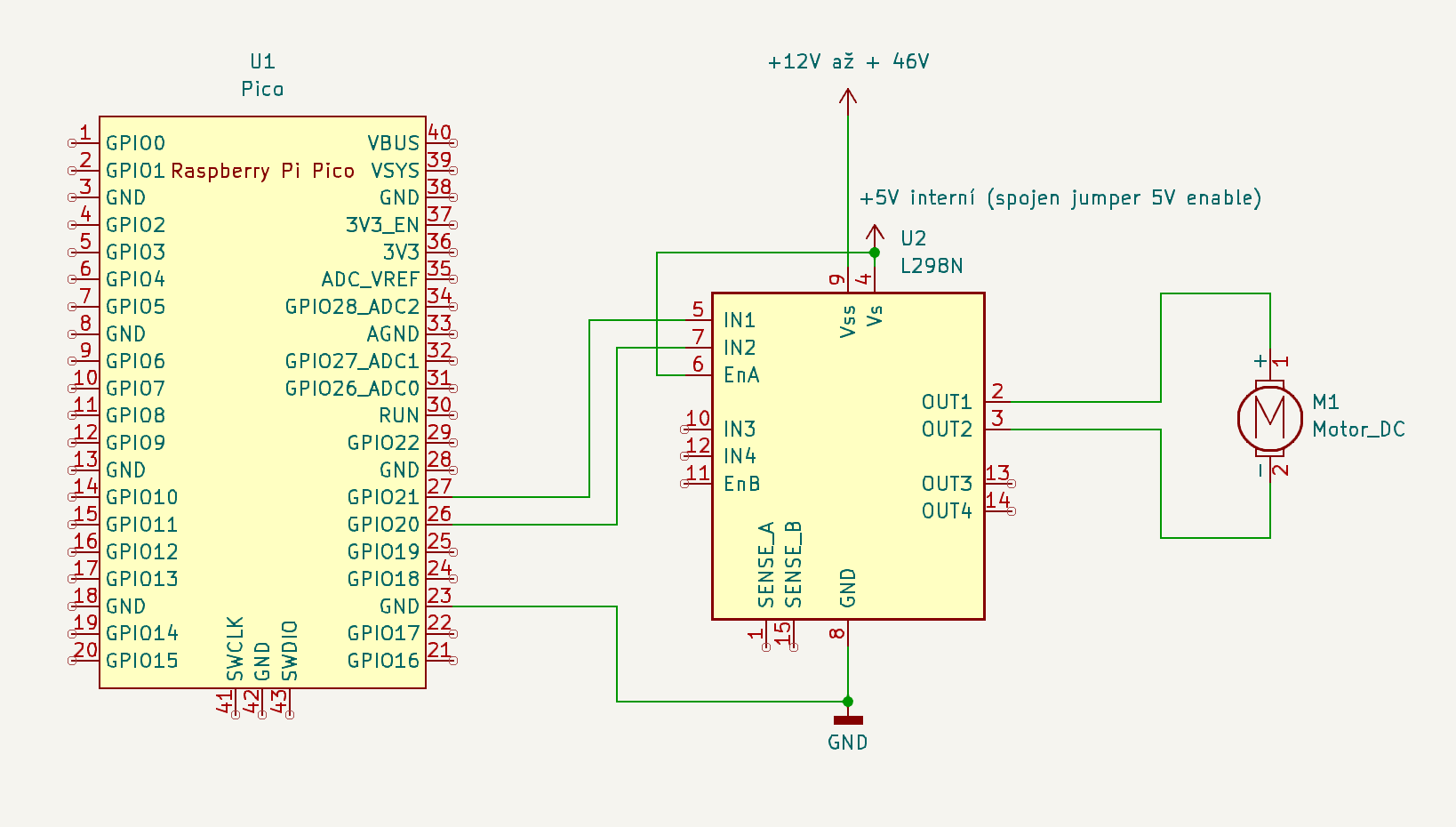
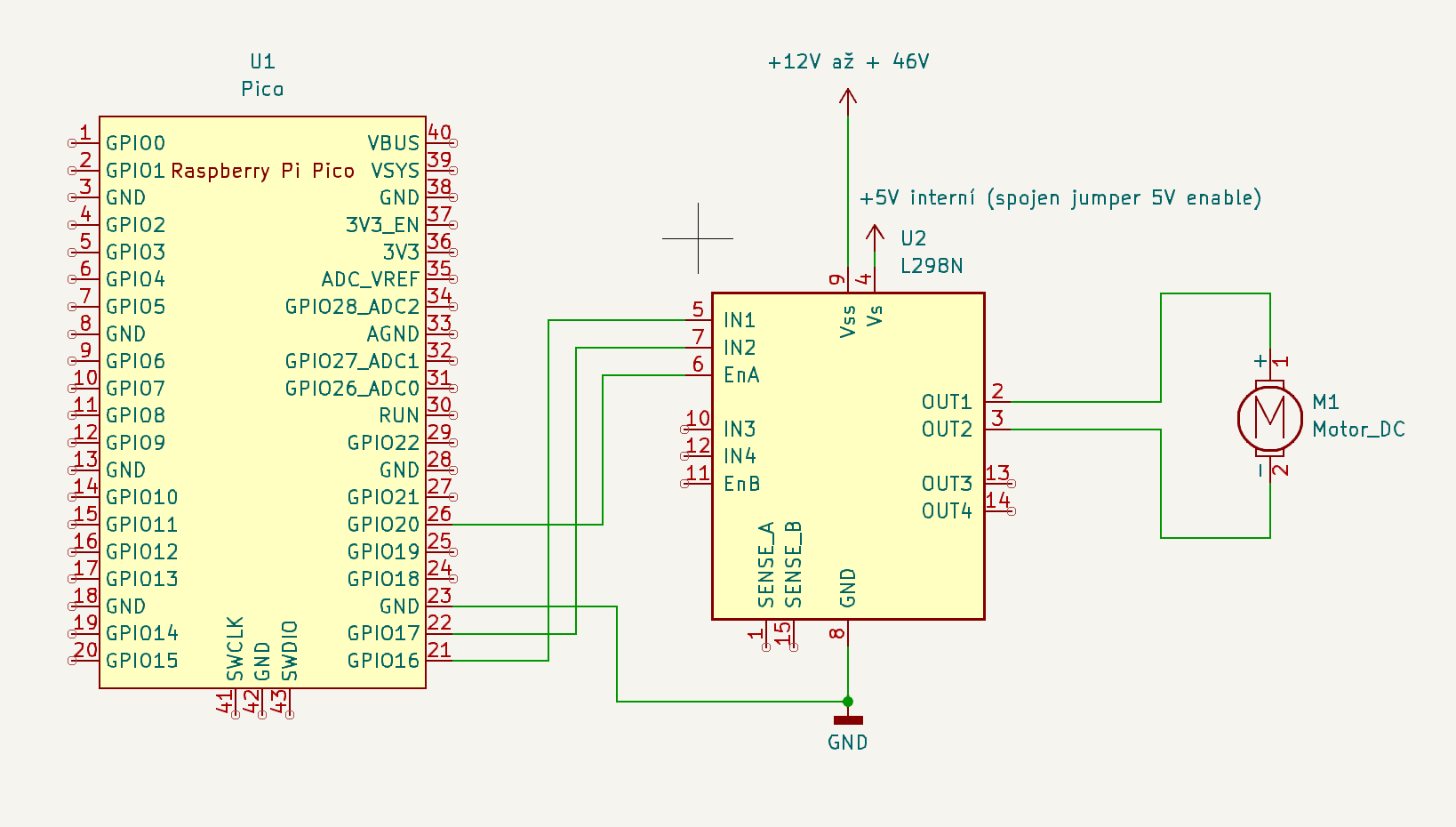
Schéma zapojení pro program v C
Program v jazyce C
/* motor_hm_l298.c
Řízení stejnosměrného motoru pomocí H můstku s obvodem L298N
(c) Jirka Chráska 2025, <jirka@lixis.cz>
*/
#define PARAM_ASSERTIONS_ENABLED_PWM 1
#include "pico/stdlib.h"
#include "hardware/pwm.h"
// datová struktura pro řízení motoru
typedef struct
{
uint gpioForward;
uint gpioBackward;
uint slice;
uint Fchan;
uint Bchan;
bool forward;
uint speed;
uint freq;
uint resolution;
bool on;
} BiMotor;
uint32_t pwm_get_wrap( uint slice_num )
{
valid_params_if( PWM, slice_num >= 0 && slice_num < NUM_PWM_SLICES );
return pwm_hw->slice[slice_num].top;
}
void pwm_set_duty( uint slice_num, uint chan, int d )
{
pwm_set_chan_level( slice_num, chan, pwm_get_wrap( slice_num ) * d / 100 );
}
// nastavení kmitočtu a střídy
uint32_t pwm_set_freq_duty( uint slice_num, uint chan, uint32_t f, int d)
{
uint32_t clock = 125000000;
uint32_t divider16 = clock / f / 4096 + ( clock % ( f * 4096 ) != 0 );
if( divider16 / 16 == 0 ) { divider16 = 16; }
uint32_t wrap = clock * 16 / divider16 / f - 1;
pwm_set_clkdiv_int_frac( slice_num, divider16 / 16, divider16 & 0xf);
pwm_set_wrap( slice_num, wrap );
pwm_set_chan_level( slice_num, chan, wrap * d / 100);
return wrap;
}
// inicializace struktury BiMotor
// @param m: motor
// @param gpioForward: pin pro řízení dopředu
// @param gpioBackward: pin pro řízení dozadu
// @param freq: řídící kmitočet
void BiMotorInit( BiMotor *m, uint gpioForward, uint gpioBackward, uint freq )
{
// nastaveni pinu pro chod dopředu
gpio_set_function( gpioForward, GPIO_FUNC_PWM );
m->gpioForward = gpioForward;
m->slice = pwm_gpio_to_slice_num( gpioForward );
m->Fchan = pwm_gpio_to_channel( gpioForward );
// nastavení pinu pro chod dozadu
gpio_set_function( gpioBackward, GPIO_FUNC_PWM );
m->gpioBackward = gpioBackward;
m->Bchan = pwm_gpio_to_channel( gpioBackward );
m->freq = freq;
m->speed = 0;
m->forward = true;
m->resolution = pwm_set_freq_duty( m->slice, m->Fchan, m->freq, 0 );
pwm_set_duty( m->slice, m->Bchan, 0);
m->on = false;
}
// nastavení rychlosti s motoru a směru otáčení forward
// @param m: motor
// @param s: rychlost
// @param forward: true - dopředu, false dozadu
void BiMotorSpeed( BiMotor *m, int s, bool forward )
{
if( forward ) {
pwm_set_duty( m->slice, m->Bchan, 0 );
pwm_set_duty( m->slice, m->Fchan, s );
} else {
pwm_set_duty( m->slice, m->Fchan, 0 );
pwm_set_duty( m->slice, m->Bchan, s );
}
m->speed = s;
}
// zapnutí motoru
void BiMotorOn( BiMotor *m )
{
pwm_set_enabled(m->slice, true );
m->on = true;
}
// vypnutí motoru
void BiMotorOff( BiMotor *m )
{
pwm_set_enabled(m->slice, false );
m->on = false;
}
int main()
{
BiMotor mot1;
// GPIO20 slouží k řízení PWM dopředu
// GPIO21 slouží k řízení PWM dozadu
// ENA na H-můstku je spojeno jumperem s 5V
// jumper 5V je zapojen
// kmitočet PWM 3kHz
BiMotorInit( &mot1, 20, 21, 3000);
BiMotorOn( &mot1 );
while (true) {
BiMotorSpeed( &mot1, 30, true ); // jedeme dopředu pomalu
sleep_ms( 2000 );
BiMotorSpeed( &mot1, 60, true ); // jedeme dopředu rychleji
sleep_ms( 2000 );
BiMotorSpeed( &mot1, 20, true ); // jedeme dopředu hodně pomalu
sleep_ms( 2000 );
BiMotorSpeed( &mot1, 30, false ); // jedeme dozadu pomalu (tady motor cukne)
sleep_ms( 2000 );
BiMotorSpeed( &mot1, 20, false ); // jedeme dozadu hodně pomalu
sleep_ms( 2000 );
BiMotorSpeed( &mot1, 0, true ); // stojíme
sleep_ms( 2000 );
}
return 0;
}cmake_minimum_required(VERSION 3.12)
include($ENV{PICO_SDK_PATH}/external/pico_sdk_import.cmake)
project(motor1)
pico_sdk_init()
add_executable(motor1
motor_hm_l298.c
)
target_link_libraries(motor1
pico_stdlib
hardware_pwm
)
pico_enable_stdio_usb(motor1 1)
pico_enable_stdio_uart(motor1 0)
pico_add_extra_outputs(motor1)$ mkdir build
$ cd build
$ cmake ..
$ make -j8Výsledný program pro Pico build/motor1.uf2
Řízení motoru v MicroPythonu
V MicroPythonu řídíme motor trochu jiným způsobem. Na pin ENA můstku přivádíme PWM signál a směr otáčení motoru řídíme piny IN1 a IN2
| IN1 | IN2 | stav motoru | ENA (střída určuje rychlost točení) |
|---|---|---|---|
low |
low |
motor stojí |
0 |
low |
high |
motor se točí jedním směrem |
0 až 100% |
high |
low |
motor se točí obráceně |
0 až 100% |
high |
high |
motor elektricky brzdí |
# řízení stejnosměrného motoru H-můstkem L298N
from machine import Pin, PWM
from time import sleep
# nastavení pinů
in1 = Pin(16, Pin.OUT) # pin GP16 pro řízení dopředu - spojen s IN1 na H můstku
in2 = Pin(17, Pin.OUT) # pin GP17 pro řízení dozadu - spojen s IN2 na H můstku
# dopředu se motor točí pokud je in1 HIGH a in2 LOW
# dozadu se motor točí pokud je in1 LOW a in2 HIGH
ena = PWM(Pin(20)) # pin 20 pro nastavení rychlosti otáčení - spojen s ENA na H můstku
ena.freq(300) # nastavení kmitočtu řízení 300 Hz
# nastavení rychlosti dopředu
def motor_dopredu( rychlost ):
in2.low()
in1.high()
ena.duty_u16( rychlost ) # rychost musí být v rozsahu 0 - 65535
# nastavení rychosti dozadu
def motor_dozadu( rychlost ):
in1.low()
in2.high()
ena.duty_u16( rychlost ) # rychlost musí být v rozsahu 0 - 65535
# zastavení motoru
def motor_stop():
in1.low()
in2.low()
ena.duty_u16(0)
# testování
try:
while True:
print("Jedeme dopředu 25")
motor_dopredu(16384)
sleep(2)
print("Jedeme dopředu 50")
motor_dopredu(32762)
sleep(2)
print("Jedeme dopředu 91")
motor_dopredu(60000)
sleep(2)
print("Zastavíme")
motor_stop()
sleep(2)
print("Couváme 25")
motor_dozadu(16384)
sleep(4)
motor_stop()
sleep(2)
except KeyboardInterrupt:
motor_stop()
print("Zastavili jsme, konec programu.")
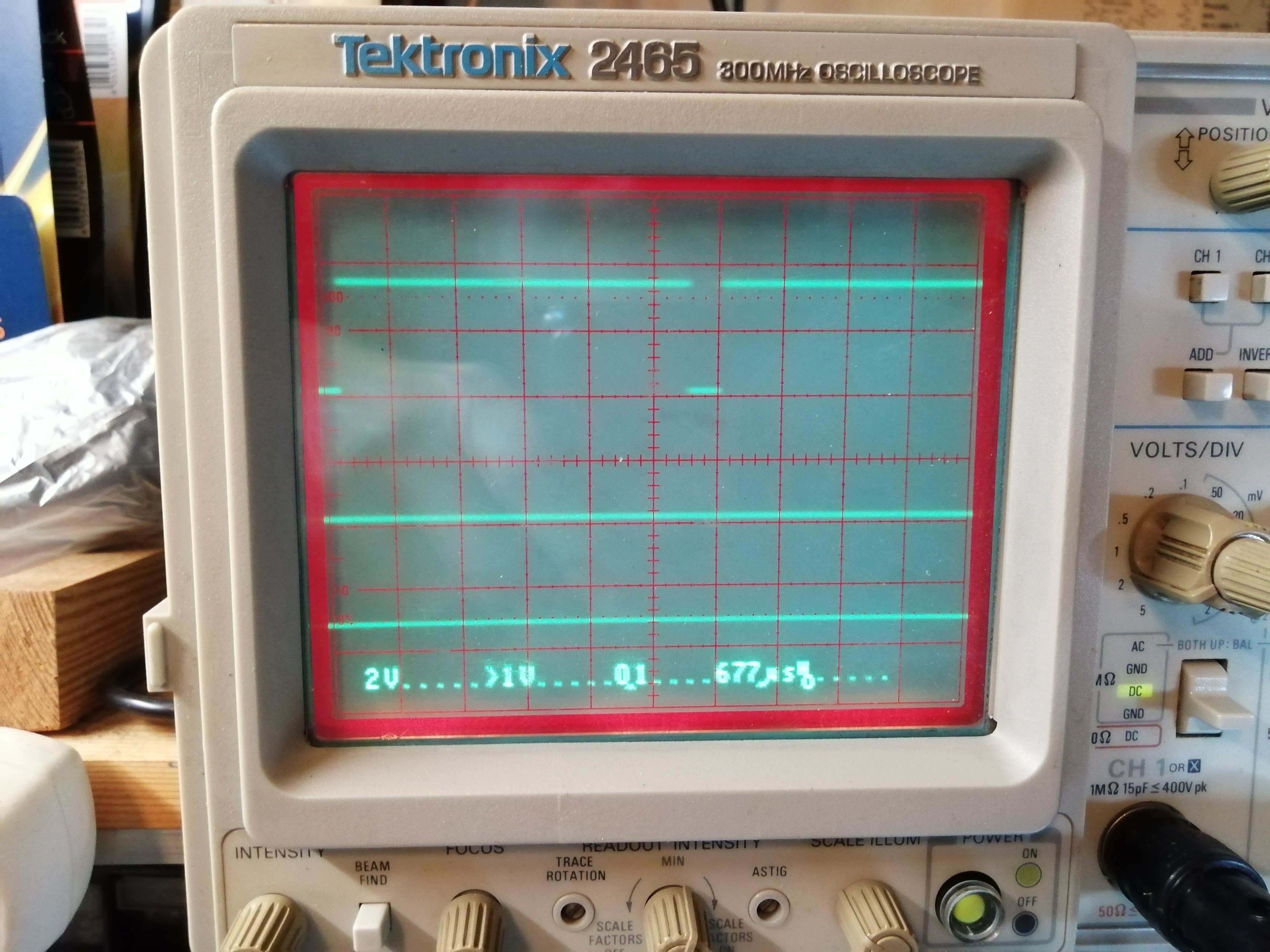
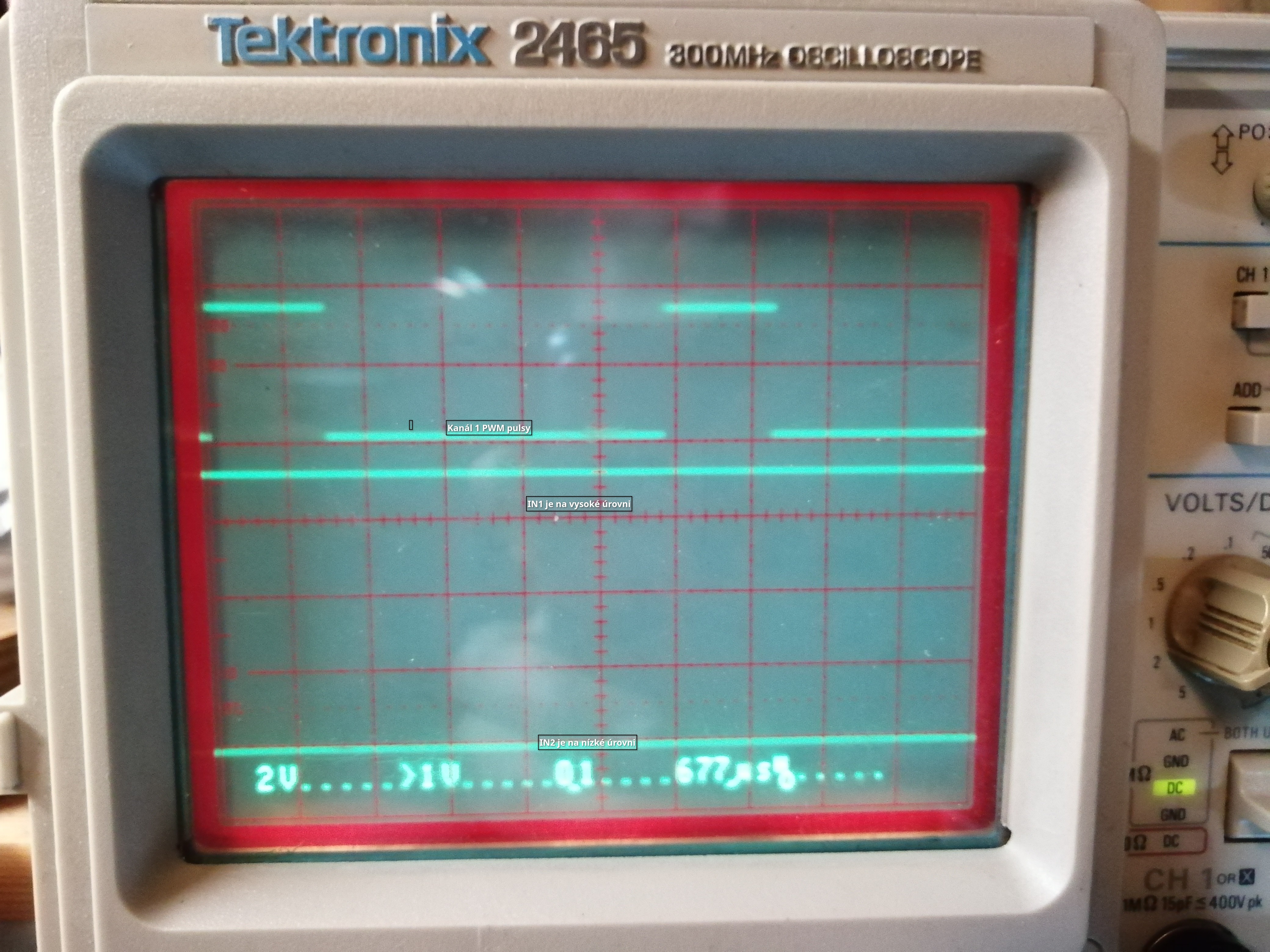
Měření osciloskopem
Zdroje a odkazy
Zde se dá modul L298N koupit: H-můstek L298N, dvoumotorový modul — Laskakit