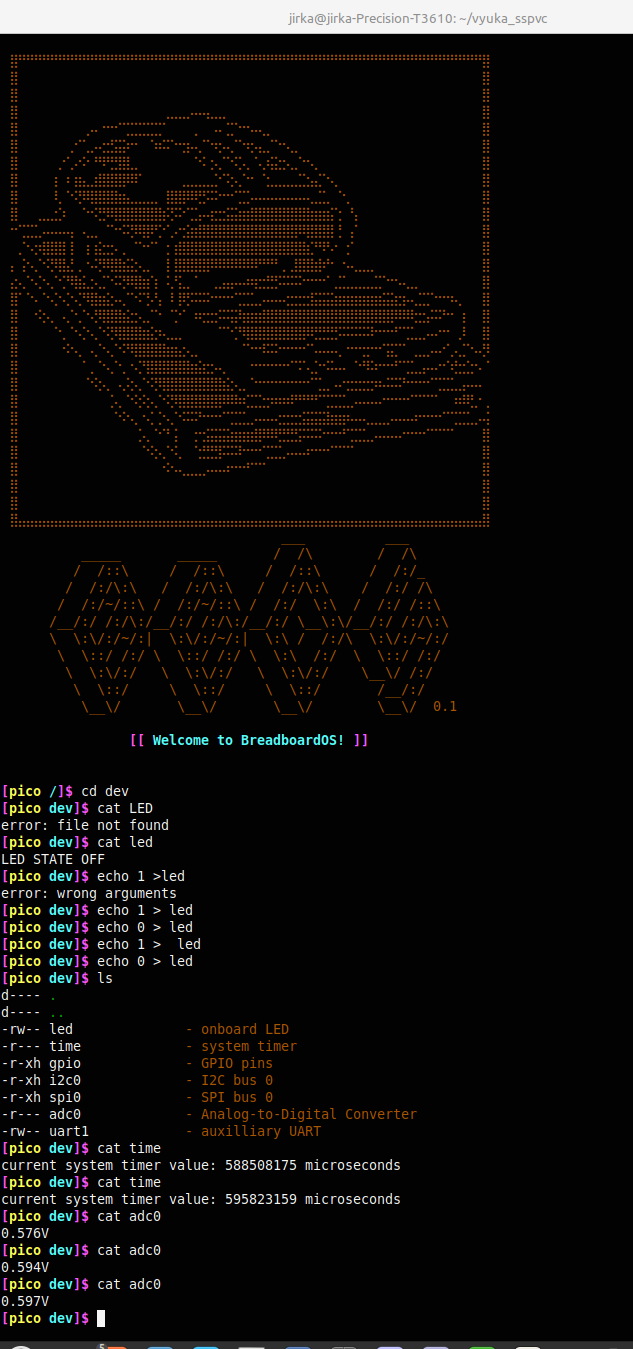
V tomto článku se podělím o zkušenosti s BreadboarOS.
Je postaven v nemalé části na podstatné práci ostatních:
Jak to rozchodit
Předpoklady
-
Máme nastaveny základní věci pro vývod na ARM platformu
build-essential gcc-arm-none-eabi newlib-arm-none-eabi cmake -
Máme naistalované Pico-SDK a nastavené
PICO_SDK_PATH -
Máme stažené jádro FreeRTOS a nastavené
FREERTOS_KERNEL_PATH
Sestavení
-
Naklonujeme repozitář z githubu: git clone https://github.com/mcknly/breadboard-os.git
-
Skočíme do adresáře: cd breadboard-os
-
Stáhneme z githubu ostatní moduly: git submodule update --init
-
Editujeme
CMakeLists.txta nastavíme si svoje věci.
### PROJECT SETTINGS ###
# PROJECT NAME - in quotes, no spaces
set(PROJ_NAME "bbos")
# PROJECT VERSION - in quotes, no spaces, can contain alphanumeric if necessary
set(PROJ_VER "0.1")
# CLI INTERFACE - 0: use UART for CLI (default), 1: use USB for CLI
set(CLI_IFACE 1)
# BOARD TYPE - set the RP2040 "board" being used (i.e. 'pico', 'pico_w', etc)
set(PICO_BOARD pico)-
Uděláme adresář pro sestavení a skočímě do něho: mkdir build && cd build
-
Vygenerujeme sestavovací soubory pomocí cmake: cmake ..
-
Sestavíme projekt: make -j4
-
Nahrajeme sestavené exe do Pica obvyklým způsobem
-
Připojíme konzoli třeba takto: screen /dev/ttyACM0 115200
Nalezené problémy
-
Nelze ovládat GPIO0 a GPIO1, hodnoty to sice hláší dobře, ale LED diodou to nebliká.